场景管理
场景(Scene)属于 Expertise 分类,是机器人执行任务时的空间与行为上下文配置。通过场景管理,你可以为机器人定义完整的作业环境。
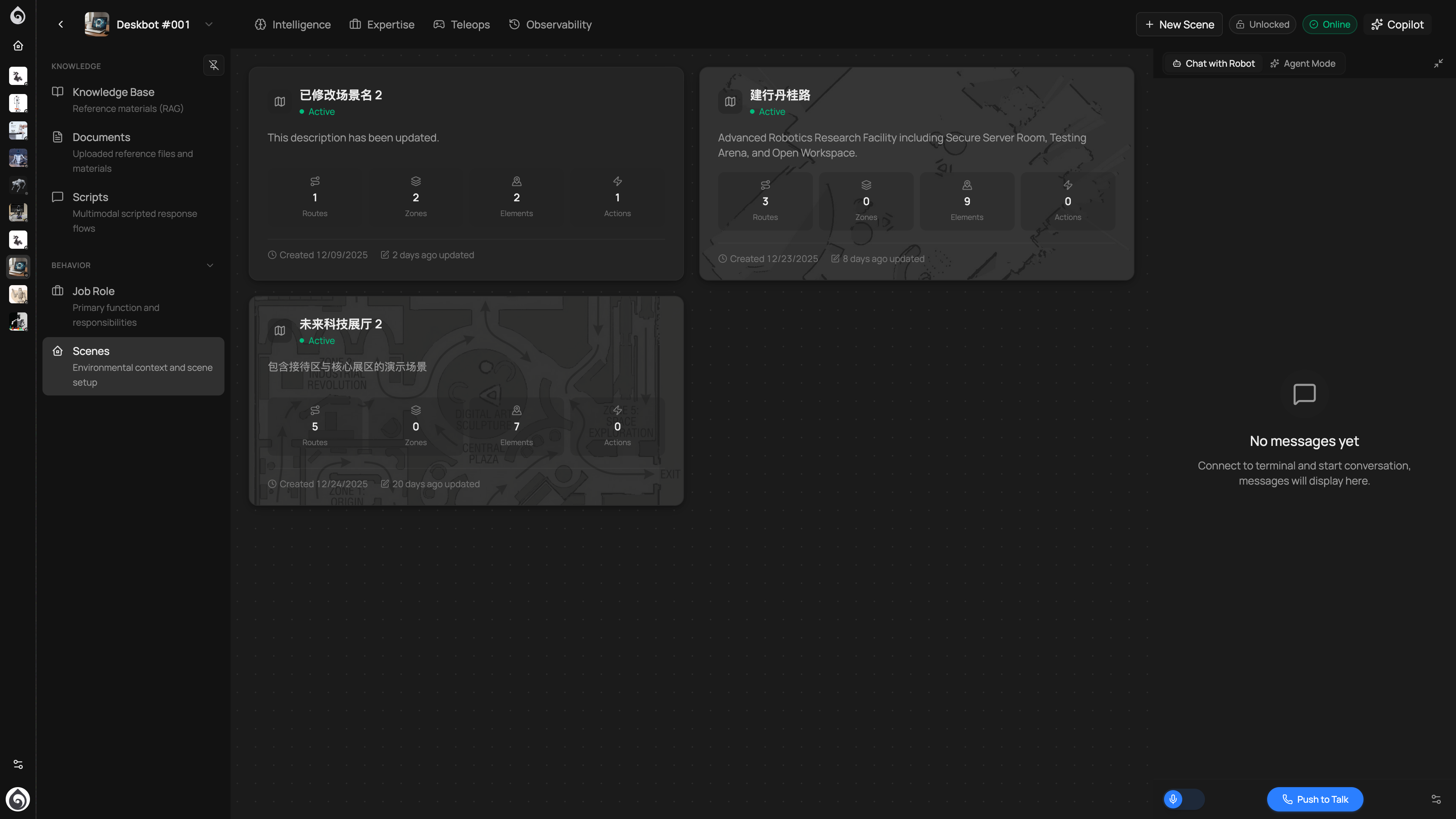
在机器人的场景页面,你可以看到所有可用场景的卡片视图。每张卡片展示:
- 场景名称与缩略地图
- 路线数量与区域数量
- 创建时间
点击场景卡片进入场景编辑器。
场景编辑器提供可视化的地图编辑能力:
场景的基础是一张地图,通常来自机器人的 SLAM 建图结果。支持的地图格式:
- 2D 占据栅格地图(PGM/PNG)
- 3D 点云地图(PCD)
路线 (Routes)
Section titled “路线 (Routes)”在地图上定义机器人的导航路径:
- 在地图上点击放置路点 (Waypoints)
- 系统自动连接相邻路点生成路线
- 可以设置路点的朝向和停留时间
- 路线支持循环和单程两种模式
区域 (Zones)
Section titled “区域 (Zones)”在地图上标记功能区域:
| 区域类型 | 说明 |
|---|---|
| 作业区 | 机器人需要执行任务的区域 |
| 充电区 | 自动回充的目标区域 |
| 禁入区 | 机器人不可进入的区域 |
| 减速区 | 需要降低速度的区域 |
编辑完成后,点击发布按钮将场景配置推送到机器人端。发布记录包含版本号,支持回滚。
一个场景可以分配给多个机器人。在场景列表中,你可以看到每个场景已分配的机器人数量。