地图查看器
实验室的地图查看器提供独立的地图可视化环境,用于查看和调试机器人建图数据。
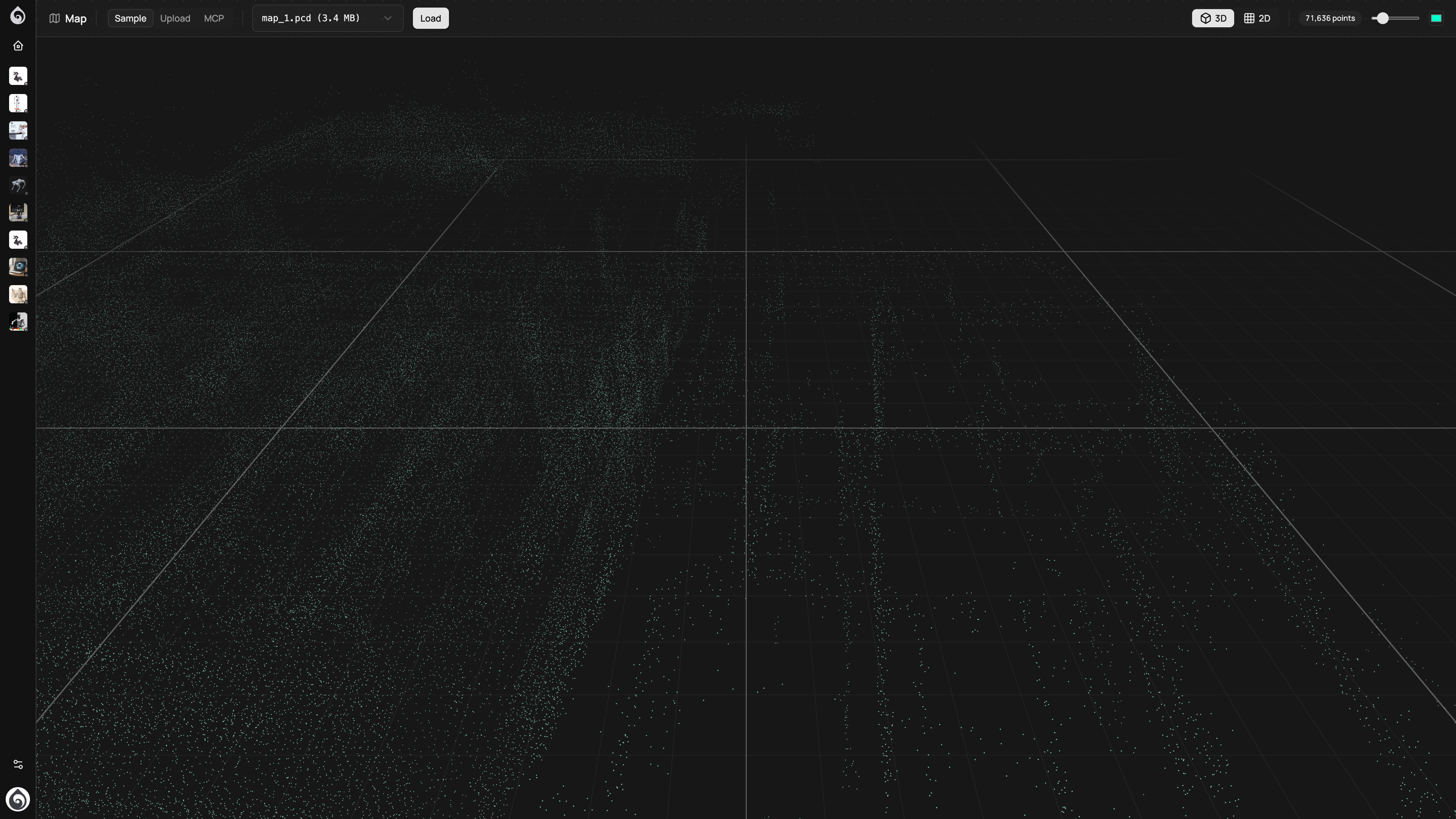
支持多种地图数据格式的可视化:
- 2D 占据栅格:标准的 ROS map_server 格式
- 3D 点云:PCD 格式的点云地图
- 混合视图:2D 和 3D 数据叠加显示
| 操作 | 说明 |
|---|---|
| 鼠标左键拖拽 | 旋转视角 |
| 鼠标右键拖拽 | 平移视图 |
| 滚轮 | 缩放 |
| 双击 | 重置视角 |
地图查看器顶部工具栏提供:
- 场景选择:从下拉菜单选择要查看的场景地图
- 图层切换:显示/隐藏路线、区域等图层
- 视角预设:俯视、侧视、3D 自由视角
- 验证建图质量:检查 SLAM 建图结果是否完整
- 调试导航路线:可视化路线在地图上的分布
- 检查区域设置:验证禁入区、充电区等区域边界
通过顶部导航栏的实验室 → 地图进入。地图查看器进入时会自动加载上次选择的场景。