实时数据调试
实时数据调试工具提供了一个交互式的 实时数据通道 REST API 客户端,帮助开发者直接查看和订阅机器人的实时遥测数据。
什么是 实时数据通道
Section titled “什么是 实时数据通道”实时数据通道 是 Ticos 使用的机器人通信协议,提供高效的发布-订阅模型。机器人端通过 实时数据通道 发布传感器数据,平台端通过 实时数据通道 REST API 订阅和消费这些数据。
Ticos 使用标准化的 实时数据通道 主题命名规范:
{robot-identifier}/rt/{component}/{sensor}/{data-type}常见主题示例:
| 主题 | 说明 |
|---|---|
robot-001/rt/unilidar/cloud | LiDAR 点云数据 |
robot-001/rt/unilidar/imu | IMU 惯性数据 |
robot-001/rt/realsense/D435_1/depth/image_rect_raw | 深度相机图像 |
robot-001/rt/motor/encoders | 电机编码器数据 |
robot-001/rt/motor/twist | 底盘速度指令 |
robot-001/rt/arm/servo_states | 机械臂关节状态 |
{identifier}/status/ticos-agent/health | 健康状态遥测 |
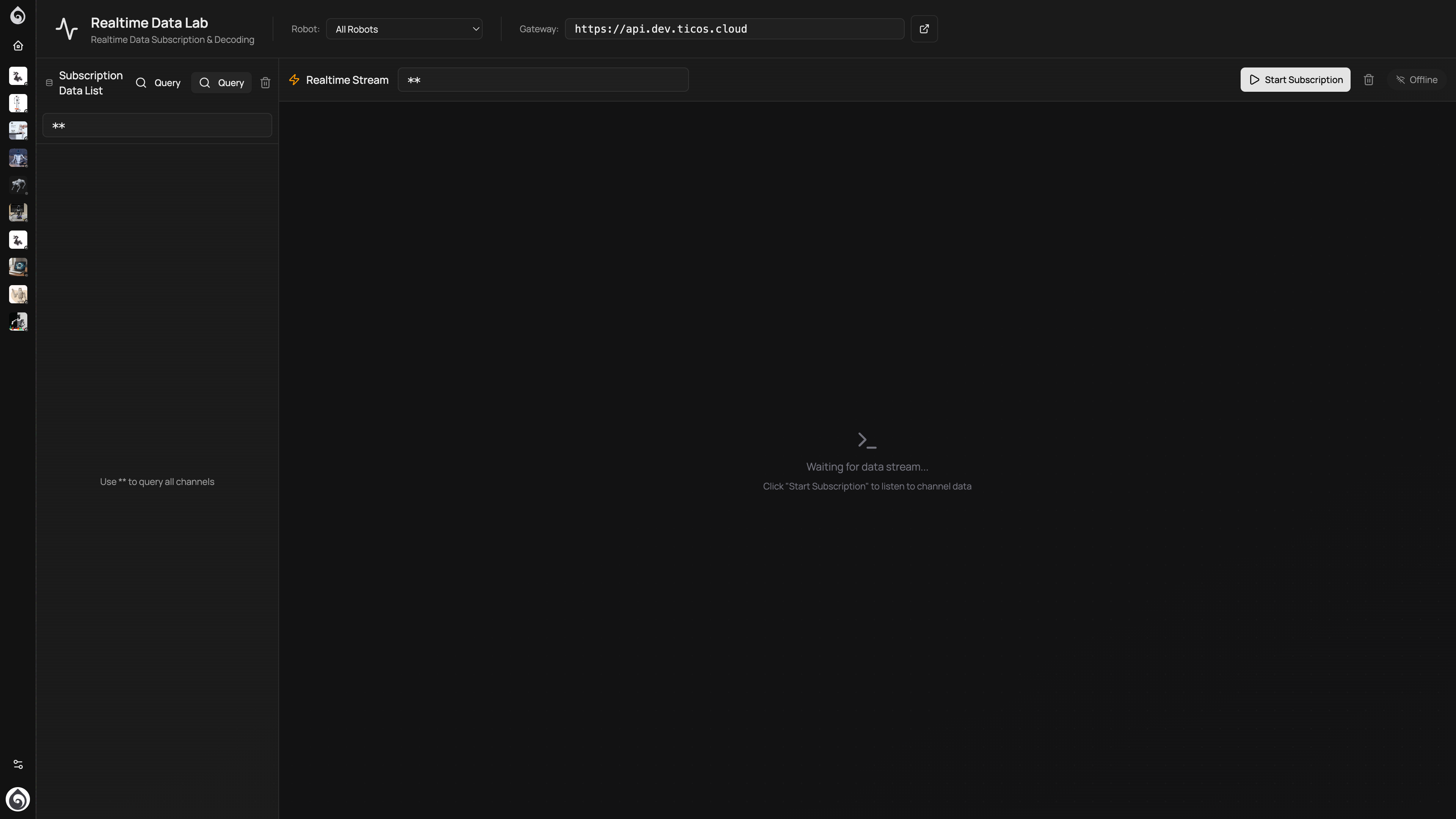
在实验室 → 实时数据通道 页面:
- 输入 实时数据通道 REST API 地址
- 输入要查询的主题关键字
- 查看返回的数据
- 检查连接:如果Teleops 传感器显示「未连接」,先在此工具验证 实时数据通道 主题是否有数据
- 数据格式:多数传感器数据使用 CDR 编码,实时数据调试界面会显示原始 base64 数据
- 主题发现:使用通配符
*查询所有可用主题