遥操作
遥操作是机器人上线前后的关键验收面板。你可以在这里确认视频流、传感器和控制链路是否可用,并在机器人遇到边界情况时进行远程接管。
上岗阶段先检查什么
Section titled “上岗阶段先检查什么”完成连接和配置后,建议按这个顺序做一次短验收:
- 打开遥操作,确认视频流是否稳定加载
- 查看关键传感器面板是否持续刷新
- 发送最小移动指令,确认机器人响应正确
- 测试紧急停止,确认人工接管链路可靠
从某一台机器人的详情页点击「遥操作」快捷入口,或从顶部导航栏点击「遥操作」标签,即可进入。
- 实时视频 — 通过 WebRTC 传输的机器人摄像头视频流
- 传感器可视化 — LiDAR、IMU、深度相机等
- 手动控制 — 键盘或手柄发送运动指令
- 对话面板 — 常驻对话面板,支持 Push to Talk 语音输入
遥操作采用灵活的可拖拽网格布局。点击顶部栏的「编辑布局」可自由调整面板的位置和大小。你可以保存自定义布局,在不同场景间切换。
- 视频流
- LiDAR 点云
- IMU 姿态
- 深度相机
- 电机状态
- 机械臂状态
- 对话面板
- 日志
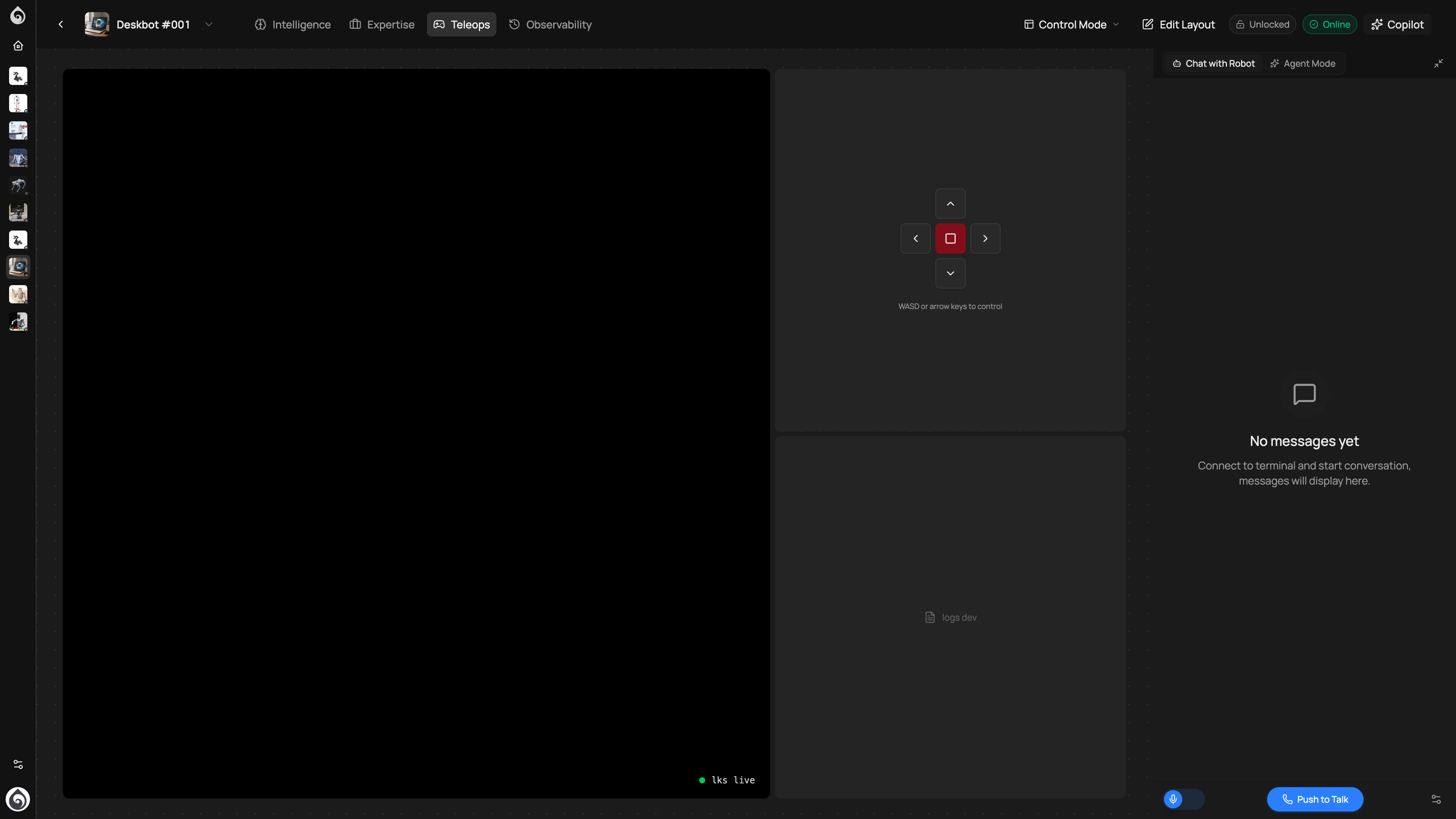
使用顶部栏的 Control Mode 下拉菜单,可根据机器人的能力切换不同控制模式。
视频流底部会显示连接状态指示器:
- 🟢 lks live — 已连接,正在接收数据
- 🟡 lks connecting — 正在建立连接
- 🔴 lks disconnected — 连接断开或机器人离线
在遥操作中,你可以使用键盘操控机器人移动:
| 按键 | 动作 |
|---|---|
W / ↑ | 前进 |
S / ↓ | 后退 |
A / ← | 左转 |
D / → | 右转 |
Space | 紧急停止 |