机型管理
机型(Robot Model)定义了机器人的硬件特征,是注册新机器人时的必要前提。平台管理员在此页面维护所有可用的机器人型号。
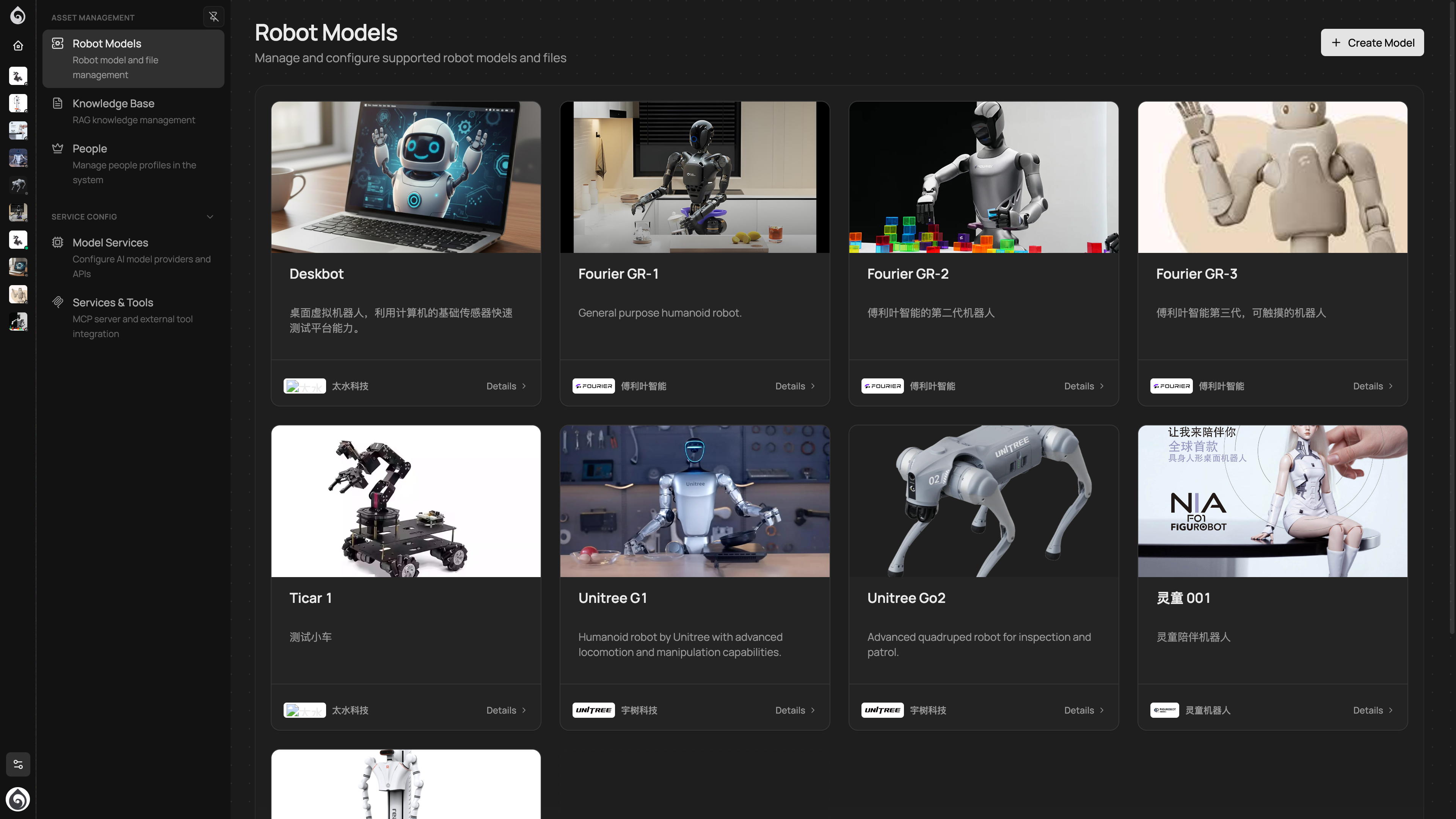
机型管理页面展示所有已注册的机器人型号,每个机型卡片包含:
- 型号名称与图片
- URDF 模型(如已上传)
- 已注册的机器人数量
| 字段 | 说明 |
|---|---|
| 名称 | 机型名称,如「巡逻犬 Pro」 |
| 描述 | 机型的功能描述 |
| 制造商 | 硬件制造商信息 |
URDF 模型
Section titled “URDF 模型”URDF(Unified Robot Description Format)文件用于 3D 可视化。上传方式:
- 将 URDF 文件和相关资源(mesh 文件等)打包为压缩文件
- 上传到机型的模型管理页面
- 系统会自动解析并在 3D 查看器中预览
上传机器人机型时,请确保 ZIP 文件符合以下规则:
- 文件格式:必须是
.zip压缩包 - 文件结构:
.urdf文件必须位于 ZIP 根目录或单层子目录中- URDF 中引用的 mesh 文件必须包含在 ZIP 内
- 路径引用:
- URDF 中所有 mesh 引用(如
<mesh filename="package://...">或相对路径)必须能相对于 ZIP 中的 URDF 文件位置正确解析 - 避免使用绝对路径
- URDF 中所有 mesh 引用(如
有效结构示例:
my-robot.zip├── robot.urdf├── meshes/│ ├── base_link.stl│ └── wheel.dae上传后可以使用诊断功能检查 URDF 文件的完整性:
- 检测缺失的 mesh 引用
- 验证关节链接结构
- 预览模型渲染效果
- 开发阶段:上传 URDF 后在 3D 查看器中验证模型外观
- 部署阶段:注册新机器人时选择对应机型
- 运维阶段:通过机型分组管理同类型机器人